Parturition Prediction

Juvenile recruitment is a key driver of ungulate population dynamics and prediction of parturition has been an important development to provide information about productivity. These predictions are possible because movement patterns change during and after parturition. There have been numerous approaches used to predict parturition of ungulates, including visual surveys in bighorned sheep, as well as the use of vaginal implant transmitters for white-tailed deer, and elk. Severud et al. (2015) generated automated reports of recent movement rates of moose, for observers to visually inspect movement paths to decide whether a birthing event was occurring. Recent model development for prediction of parturition in ungulates has been implemented to facilitate estimation of birth rates and neonate survival for Caribou (DeMars et al., 2013; Bonar et al., 2018).
In other ungulate species, such as elk, moose and caribou, a large aberrant movement immediately prior to parturition makes the birth event straightforward to detect. Conversely, white-tailed deer signify parturition by a contraction of their movements, indicative of social isolation. This movement pattern is much more difficult to detect, particularly given a behavioral pattern already characterized by high site fidelity with distinct home ranges exemplified by white-tailed deer in the midwest.
Machine learning methods, known for predictive performance and classification offer a suite of methodological tools for sifting through the data rich information collected on individual animals with the now commonplace automated collection of telemetry data. Semi-supervised learning methods include cases where there is a large amount of input data (X), and only a small subset of labeled input data that can then used to train the model for making predictions of unlabeled data. Anomaly detection algorithms fall into this class of machine learning methods, because only a small fraction of the data are observed for labeling outlying responses and are used for training a model to predict unobserved anomalies.
We are developing an approach, to use a small number of individuals for whom we had GPS location data, coupled with a known labeled event consisting of the dropping of a vaginal implant transmitter (VIT) during birth. We used these labeled cases to train the anomaly detection algorithm by determining thresholds for the features used to predict parturition, using within-sample optimization. We used features associated with movement that could be collected using the GPS transmitter only, including locations and altitude, so that the anomaly detection algorithm could be applied in real time to individuals during the subsequent years of the study.
Methods
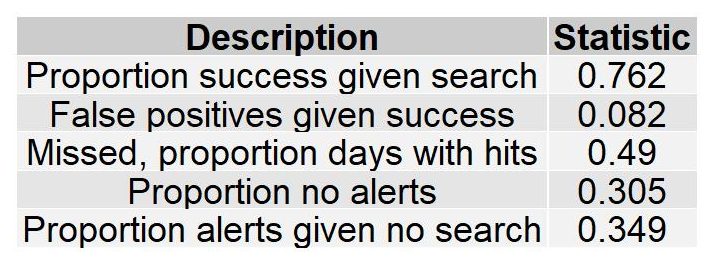
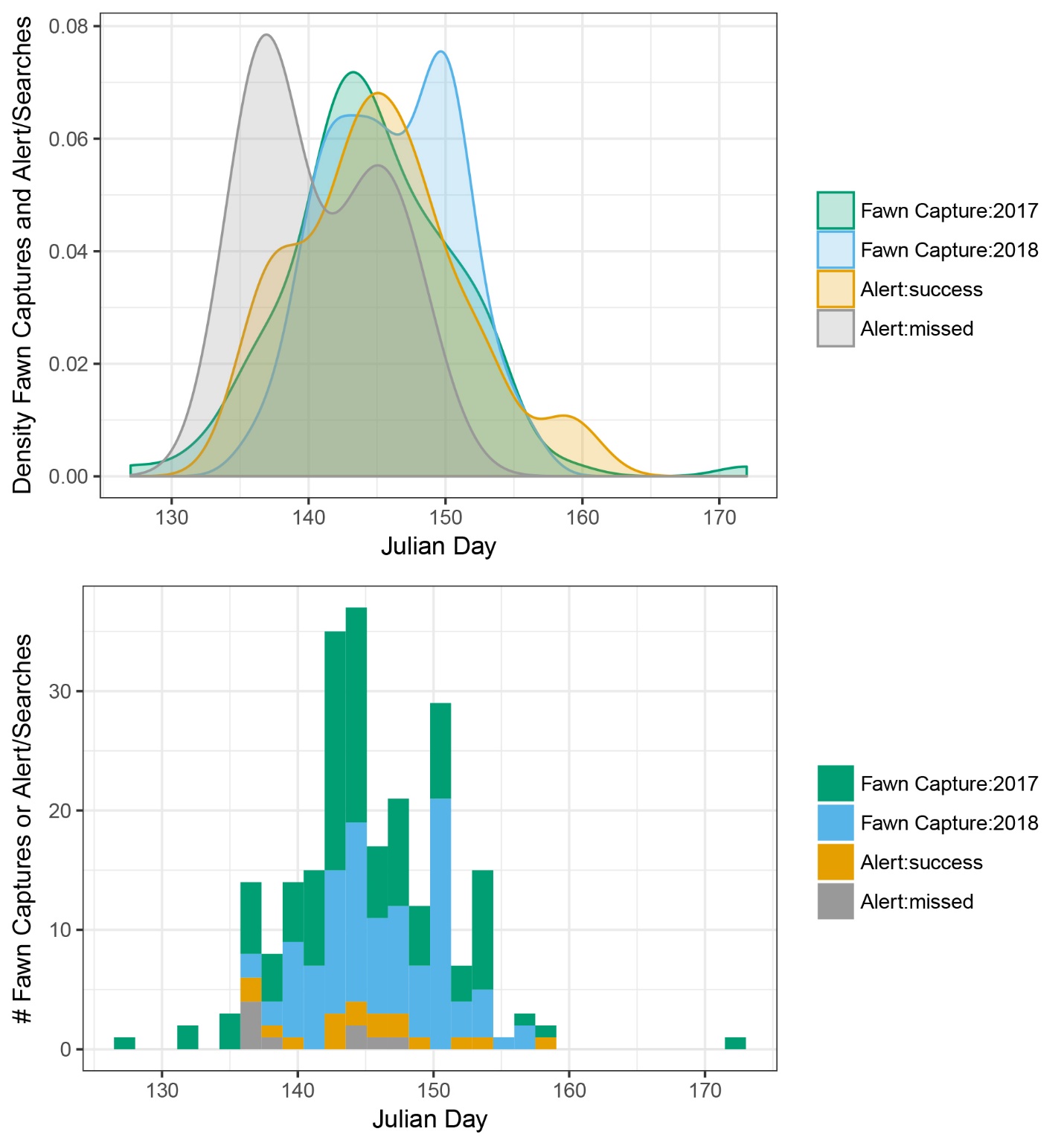
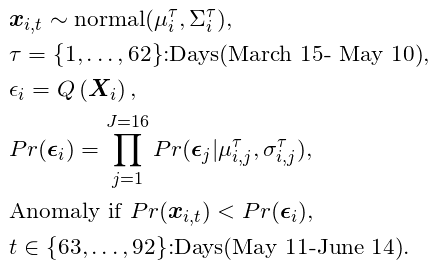
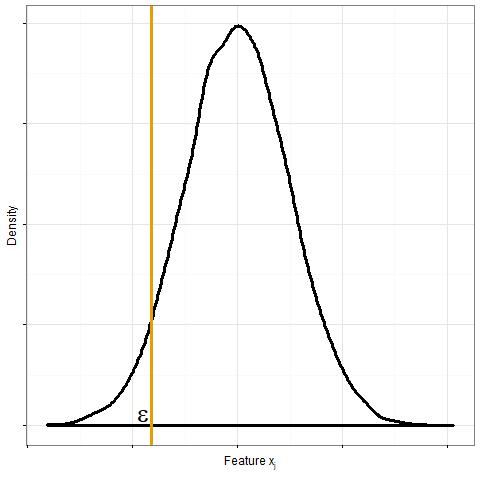
We calculated a suite of features (or predictors) using the GPS locations, calculating means and standard deviations of each feature from a window bin over 2 days. We tested mulitple bin widths but found that 2 days had the best performance. We then made numerous assumptions including normality and independence of all features. The spring features from March 15-May 10, were used as a baseline with which to compare features observed after those dates. We used within sample optimization to obtain the threshold from these feature distributions to determine if there was an anomaly or not, obtaining the minimal epsilon for which we had maximum recall.
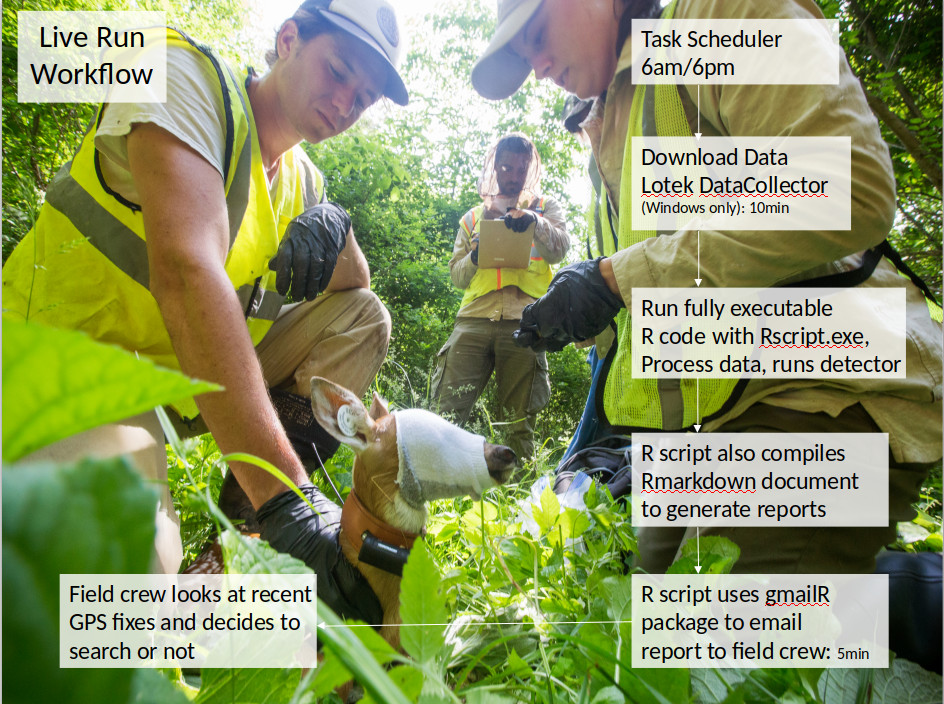
After training the algorithm, we used it during the following year to help field crews minimize fawn capture effort with an automated work flow.
Results so far have been promising. After the first year of using the Anomaly Detector, results were very encouraging. We plan to continue to refine and improve upon the algorithm for subsequent years of the south-central white-tailed deer study to help field crew capture fawns with mothers of known CWD status.